ちょっと間が空きましたが、N.I.N.A.の試用記の続編です。
前回の記事を書いてからなかなか晴れなくて、やっと日曜の夜に少しだけ星が見えたのでテストしました。本当は撮影までしたかったのですが、結局曇ってしまいNINAのテストだけで終わってしまいました。
第一回の撮影までに加えて、今回は少し応用編。導入など、撮影の準備に相当する部分になります。撮影までのことなので、本当はこちらを先に説明しても良かったのですが、一度赤道儀で導入して撮影まで進めてしまえば見通しが良くなると思ったからです。
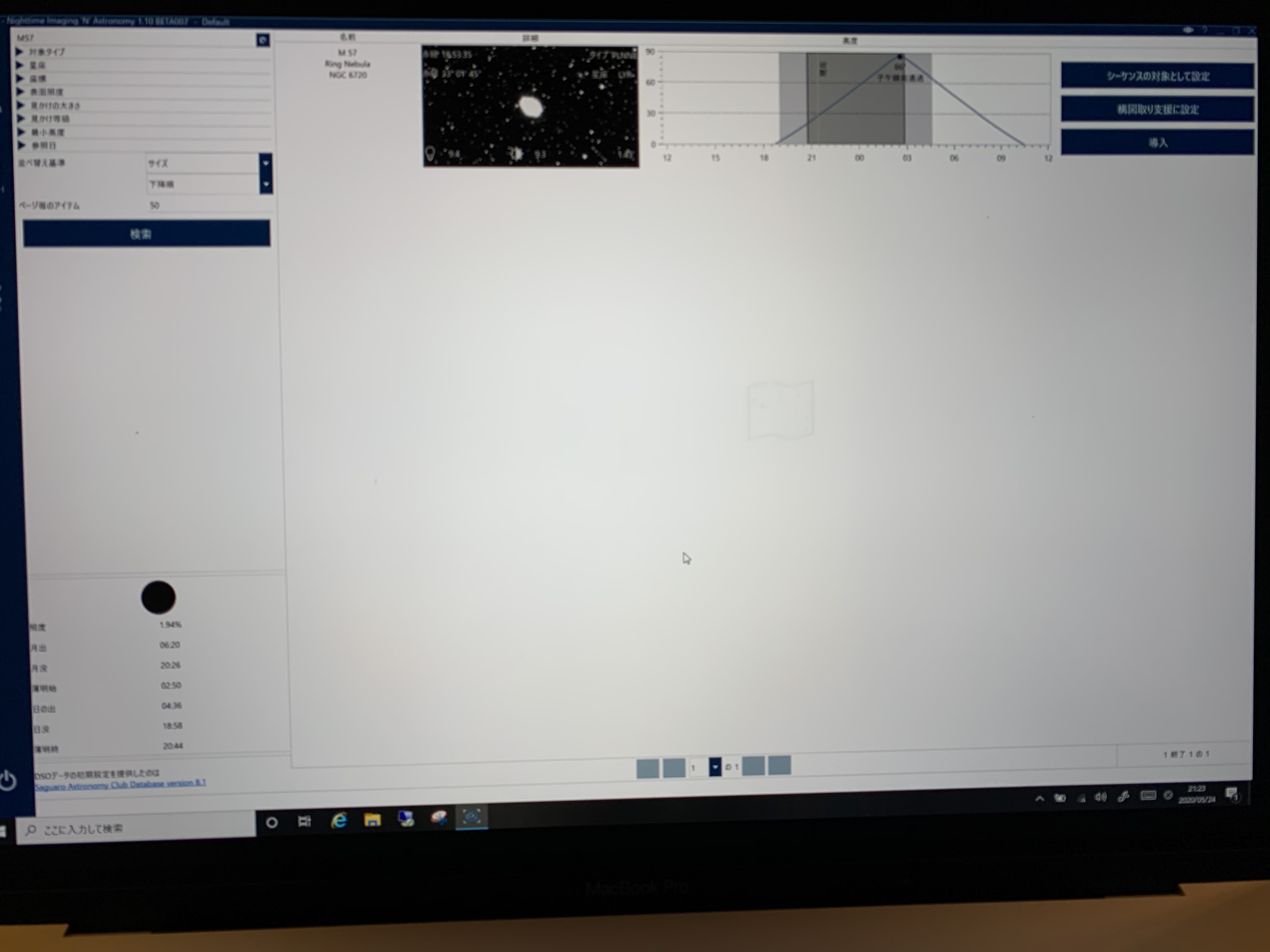
最初に左アイコン群の「スカイアトラス」でターゲットを調べるといいでしょう。左上に対象とする天体を入力します。例えばM57と入力すると、その情報が出てきます。
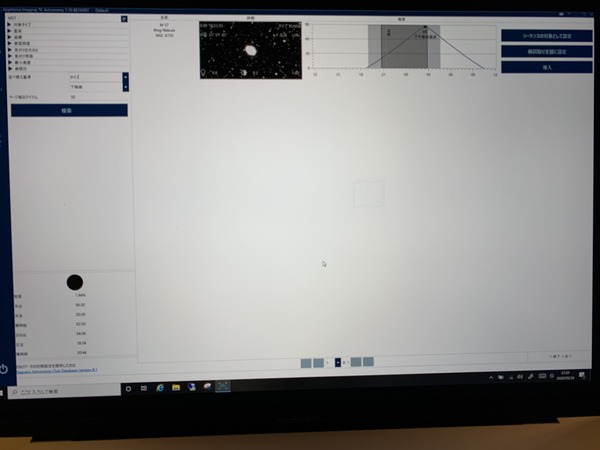
その際、「オプション」「一般」タブの「スカイアトラス画像ディレクトリ」を設定しておくといいでしょう。ここはスカイアトラスで画像を表示するために使います。サイトのダウンロードページの一番下にある「Misc」のところの「Sky Atlas Image Repository 」をダウンロード、展開して、「スカイアトラス画像ディレクトリ」で設定したディレクトリに置くと、「スカイアトラス」の「詳細」のところにカタログ画像が表示されるようになります(TKさんに教えてもらいました。ありがとうございました。)。
このスカイアトラスのところで「導入」ボタンを押してしまっても導入はできるのですが、次のフレーミングで導入した方がいいでしょう。
撮影時にPCがインターネットに接続されているなら、フレーミング機能が便利です。デフォルトで縦横3度の視野角を見るようになっていますが、画像を落とすのに結構時間がかかります。今どれくらいダウンロードしたか表示があるとよかったかもしれません。
一旦ダウンロードした画像はキャッシュに保管され、キャッシュを表示することを選べばインターネットがない環境でも確認することができます。撮影時にインターネット環境がないなら、事前に対象天体の検索して画像をダウンロードしておくといいでしょう。
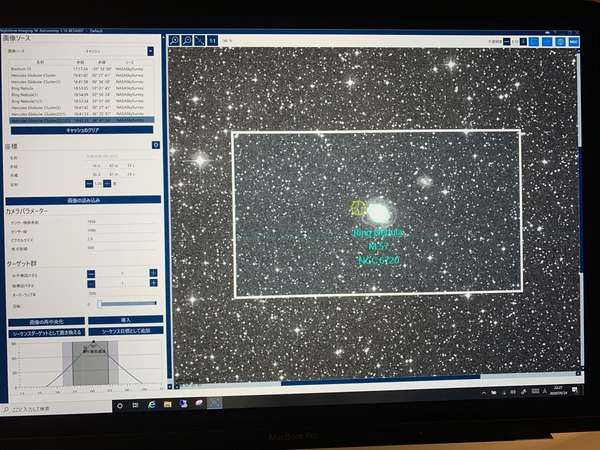
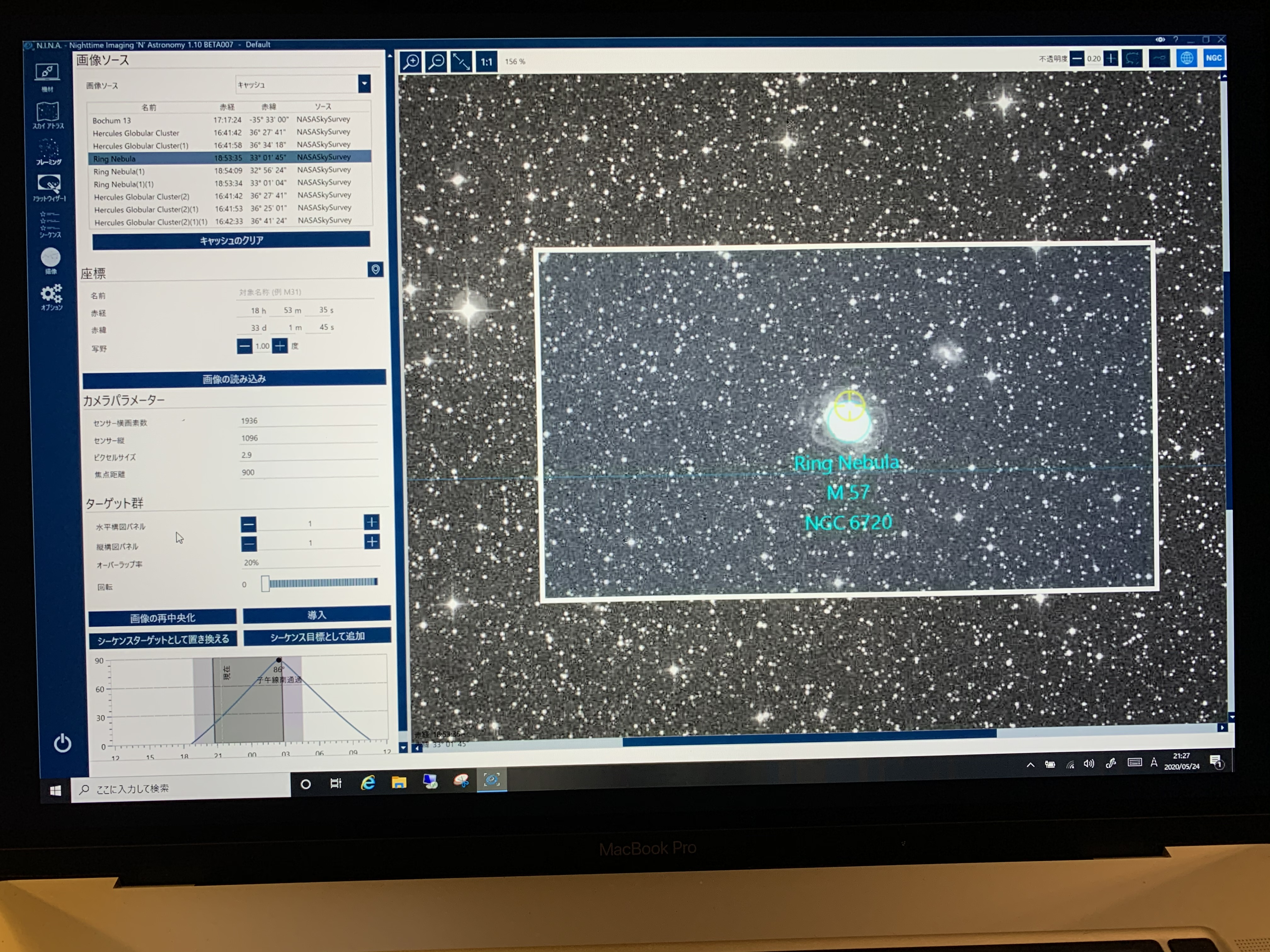
ダウンロードした画像があると、撮影時の画角や位置を確認できます。
M57を囲んで大きな四角い枠が見えます。これが接続されているカメラと、この画面の「画像の読み込み」の「カメラパラーメーター」の「焦点距離」から計算された、撮影した場合の画角になります。
黄色の丸は、現在赤道儀(望遠鏡)が向いている位置になります。上の写真の場合、M57の中心からは少しずれた位置にいることになります。でもこれは実際に向いている位置とは限らなくて、N.I.N.A.が「赤道儀が向いていると思っている」位置です。この数値は接続した赤道儀から得ています。なので、この状態で撮影しても、黄色の場所が中心なるとは限らず、後のプレートソルブを使い誤差を無くします。
さて、画角を示すこの四角は移動することができます。四角の中心が導入したい目的の位置になります。今はM57の中心が四角の中心になっているので、ここで「導入」ボタンを押してみます。すると実際の赤道儀の向きに合わせて、一旦黄色い丸が画面からはみ出し、しばらく待つと
のように、黄色い丸が画角の中心にきます。
この際、もしガイドをしっぱなしなら、PHD2のオートガイドを外すのを忘れないようにしてください。また、導入が終わったら、撮影前に再びPHD2のオートガイドをオンにするのを忘れないでください。
でもまだ注意です。ここですでに画面中央に目的の天体が導入されたかに見えますが、本当にその向きに向いているかどうかの保証はありません。赤道儀の持っている情報と実際の向きが合っているかは保証がないからです。ここで次のプレートソルブの出番です。
プレートソルブは思ったよりはるかに簡単にできました。もともとAPTで「PlateSolve 2」と「All Sky Plate Solver(ASPS)」をインストールしていたからというのもあります。この場合は「オプション」「プレートソルブ」のところでパスを通すだけで使えてしまいました。

具体的には、撮像ページで右上「ツール」アイコン群の左から3つ目「プレートソルブ」を押してプレートソルブパネルを出します。
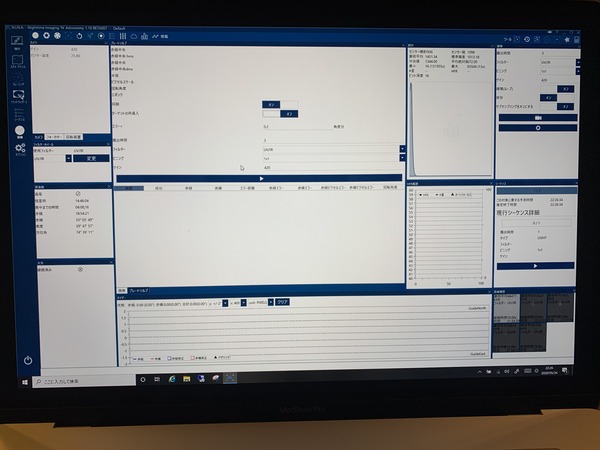
パネルの位置がわかりにくいかも知れません。「画像」パネルの下のところに「プレートソルブ」タブが出ていると思いますので、それを選択します。ここで「同期」が「オン」になっていると、プレートソルブが成功した際の位置情報が赤道儀にフィードバックされ、赤道儀上の一情報が書き換わります。その際「ターゲットの再導入」を「オン」にしておくと「エラー」の値よりも誤差が大きい場合に再度自動で導入し直してくれますが、導入は後で自分でもできるので、とりあえずはオフでいいでしょう。「露出時間」と「ゲイン」なども適当に入れます。準備ができたら、真ん中の三角の再生マークのところの「画像素取得してプレーとソルブ処理します。」を押します。
勝手に撮像が一枚始まって、プレートソルブが始まり、うまく位置が特定できると「成功」のところにチェクマークが出ます。
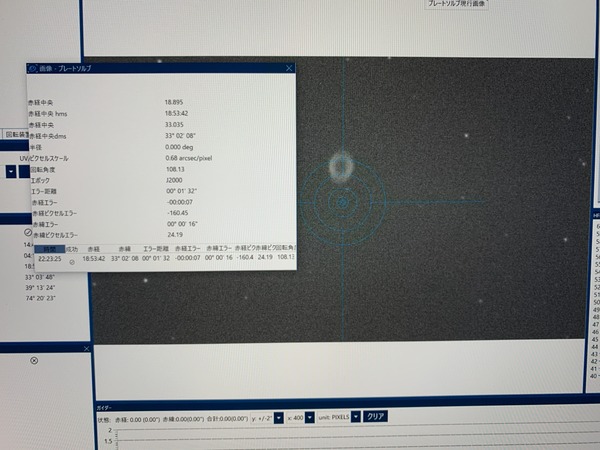
フレーミングでM57を中央にしたにもかかわらず、やはり実際に撮影するとずれしまっていて、その誤差を赤道儀側にすでにフィードバックしているので、今一度フレーミングを見てみると、
のように、黄色い丸がずれているのがわかると思います。横にずれたのはカメラが90度回転しているからです。この状態で再度「導入」を押すと黄色い丸がM57のところに行き、実際に撮影してみると
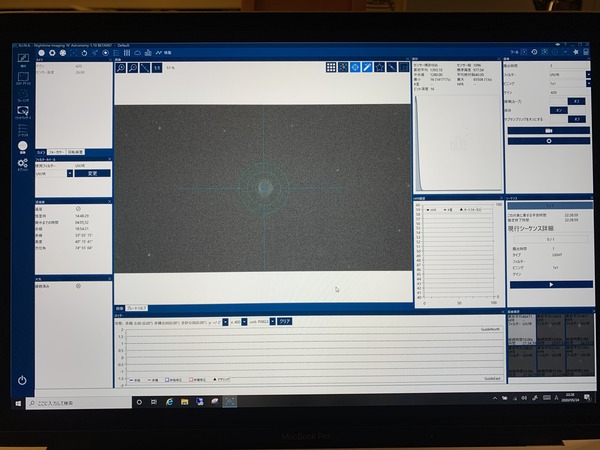
のように、今度は本当に赤道儀がM57の方向をきちんと向いていることがわかります。
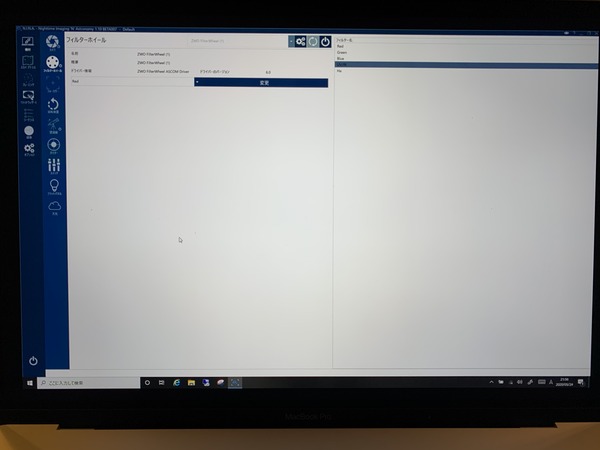
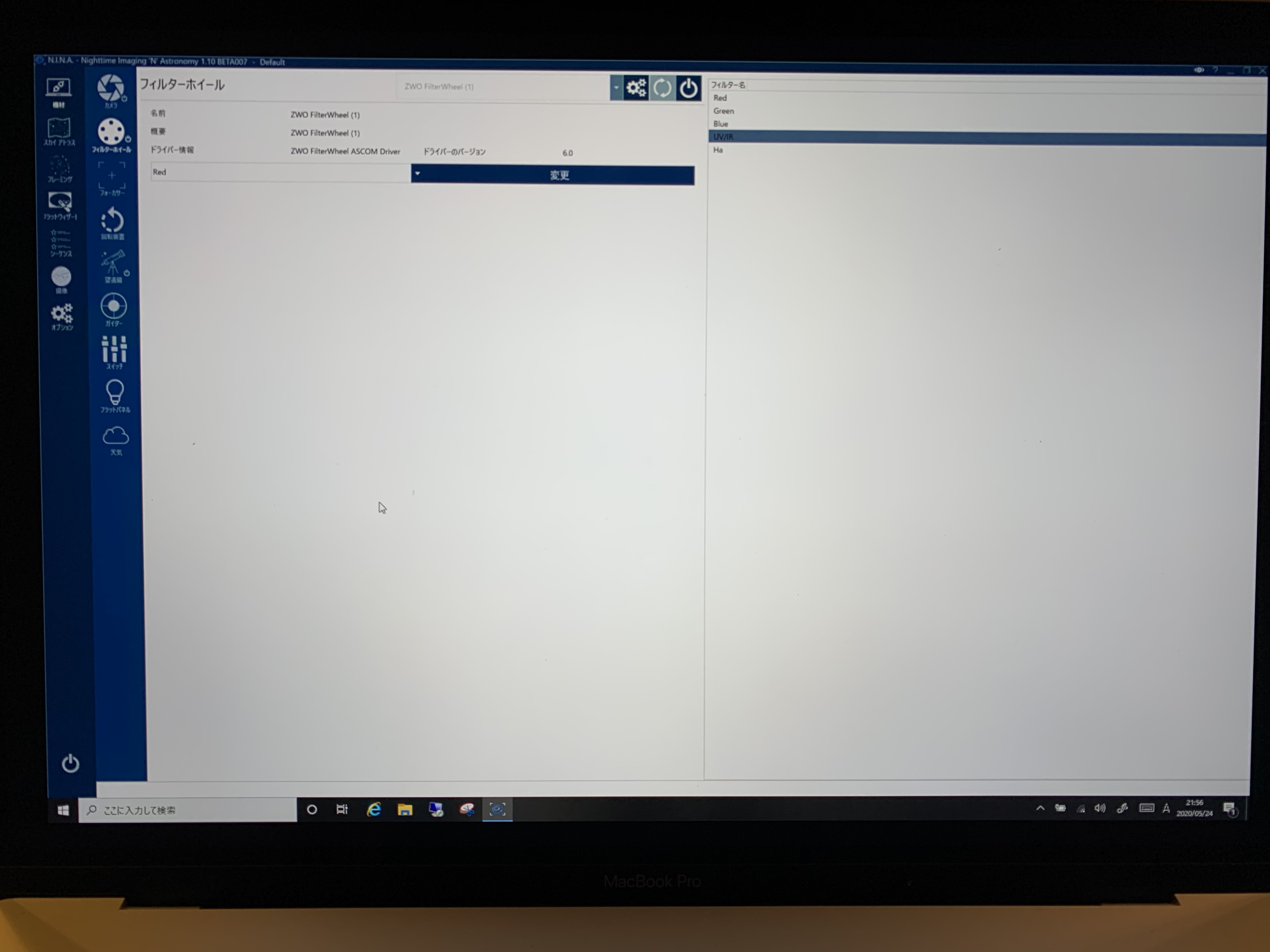
ASI290MMでLRGB撮影をやってみようと思っていて、かなり前に勝手ずっと使っていなかったZWOのフィルターホイールを繋いでみました。ポイントはEFW用のASCMOドライバーをZWOのページから落としてきてインストールしておくことと、NINAを一度再起動することです。これでNINAの「機材」の「フィルターホイール」からZWOのフィルターホイールとして認識され、選択することができるようになります。
フォーカスに関して
だいたい試したのはこれくらいでしょうか。2度に渡って使用して、その使い勝手をレポートしましたが、2回目は撮影まではしていないので、まだ説明が不十分なところもあるかもしれません。例えば、フォーカサーとかフラットパネルと接続した撮影の機能もあるみたいで、ここら辺は機材を持っていないので試すことができません。
とりあえず十分すぎるくらいの機能があることもわかって、撮影するには何も不便なところはなく、ベータ版でもすごく安定しています。
前回と今回の記事を読めば導入して撮影するまでできるのではないかと思います。わかりにくいところがあったらコメントしてください。私も全部理解しているわけではないですが、質問に答えがてら理解していきたいと思います。
前回の記事を書いてからなかなか晴れなくて、やっと日曜の夜に少しだけ星が見えたのでテストしました。本当は撮影までしたかったのですが、結局曇ってしまいNINAのテストだけで終わってしまいました。
第一回の撮影までに加えて、今回は少し応用編。導入など、撮影の準備に相当する部分になります。撮影までのことなので、本当はこちらを先に説明しても良かったのですが、一度赤道儀で導入して撮影まで進めてしまえば見通しが良くなると思ったからです。
スカイアトラス
最初に左アイコン群の「スカイアトラス」でターゲットを調べるといいでしょう。左上に対象とする天体を入力します。例えばM57と入力すると、その情報が出てきます。
その際、「オプション」「一般」タブの「スカイアトラス画像ディレクトリ」を設定しておくといいでしょう。ここはスカイアトラスで画像を表示するために使います。サイトのダウンロードページの一番下にある「Misc」のところの「Sky Atlas Image Repository 」をダウンロード、展開して、「スカイアトラス画像ディレクトリ」で設定したディレクトリに置くと、「スカイアトラス」の「詳細」のところにカタログ画像が表示されるようになります(TKさんに教えてもらいました。ありがとうございました。)。
このスカイアトラスのところで「導入」ボタンを押してしまっても導入はできるのですが、次のフレーミングで導入した方がいいでしょう。
フレーミング
撮影時にPCがインターネットに接続されているなら、フレーミング機能が便利です。デフォルトで縦横3度の視野角を見るようになっていますが、画像を落とすのに結構時間がかかります。今どれくらいダウンロードしたか表示があるとよかったかもしれません。
一旦ダウンロードした画像はキャッシュに保管され、キャッシュを表示することを選べばインターネットがない環境でも確認することができます。撮影時にインターネット環境がないなら、事前に対象天体の検索して画像をダウンロードしておくといいでしょう。
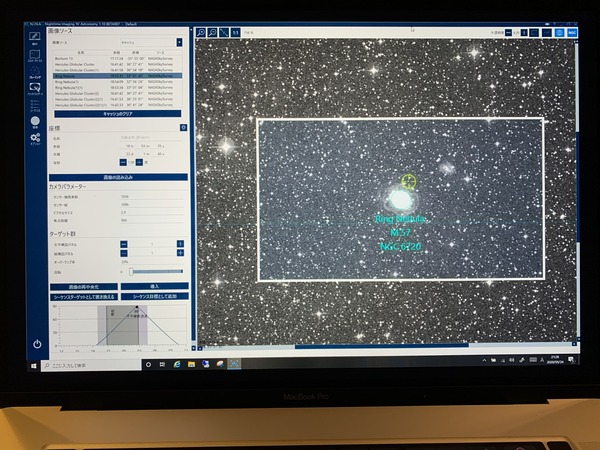
ダウンロードした画像があると、撮影時の画角や位置を確認できます。

M57を囲んで大きな四角い枠が見えます。これが接続されているカメラと、この画面の「画像の読み込み」の「カメラパラーメーター」の「焦点距離」から計算された、撮影した場合の画角になります。
黄色の丸は、現在赤道儀(望遠鏡)が向いている位置になります。上の写真の場合、M57の中心からは少しずれた位置にいることになります。でもこれは実際に向いている位置とは限らなくて、N.I.N.A.が「赤道儀が向いていると思っている」位置です。この数値は接続した赤道儀から得ています。なので、この状態で撮影しても、黄色の場所が中心なるとは限らず、後のプレートソルブを使い誤差を無くします。
さて、画角を示すこの四角は移動することができます。四角の中心が導入したい目的の位置になります。今はM57の中心が四角の中心になっているので、ここで「導入」ボタンを押してみます。すると実際の赤道儀の向きに合わせて、一旦黄色い丸が画面からはみ出し、しばらく待つと
のように、黄色い丸が画角の中心にきます。
この際、もしガイドをしっぱなしなら、PHD2のオートガイドを外すのを忘れないようにしてください。また、導入が終わったら、撮影前に再びPHD2のオートガイドをオンにするのを忘れないでください。
でもまだ注意です。ここですでに画面中央に目的の天体が導入されたかに見えますが、本当にその向きに向いているかどうかの保証はありません。赤道儀の持っている情報と実際の向きが合っているかは保証がないからです。ここで次のプレートソルブの出番です。
プレートソルブ
プレートソルブは思ったよりはるかに簡単にできました。もともとAPTで「PlateSolve 2」と「All Sky Plate Solver(ASPS)」をインストールしていたからというのもあります。この場合は「オプション」「プレートソルブ」のところでパスを通すだけで使えてしまいました。

具体的には、撮像ページで右上「ツール」アイコン群の左から3つ目「プレートソルブ」を押してプレートソルブパネルを出します。

パネルの位置がわかりにくいかも知れません。「画像」パネルの下のところに「プレートソルブ」タブが出ていると思いますので、それを選択します。ここで「同期」が「オン」になっていると、プレートソルブが成功した際の位置情報が赤道儀にフィードバックされ、赤道儀上の一情報が書き換わります。その際「ターゲットの再導入」を「オン」にしておくと「エラー」の値よりも誤差が大きい場合に再度自動で導入し直してくれますが、導入は後で自分でもできるので、とりあえずはオフでいいでしょう。「露出時間」と「ゲイン」なども適当に入れます。準備ができたら、真ん中の三角の再生マークのところの「画像素取得してプレーとソルブ処理します。」を押します。
勝手に撮像が一枚始まって、プレートソルブが始まり、うまく位置が特定できると「成功」のところにチェクマークが出ます。

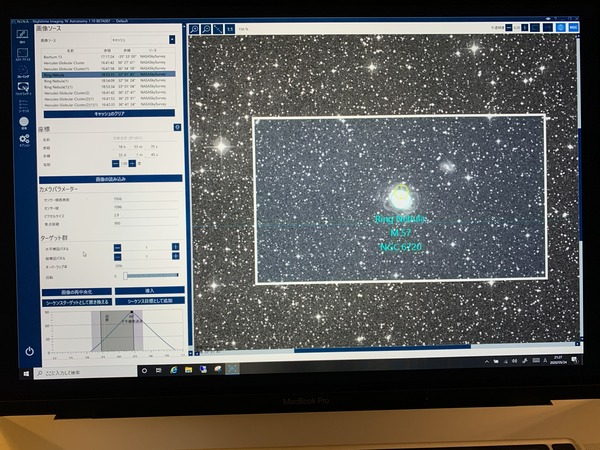
フレーミングでM57を中央にしたにもかかわらず、やはり実際に撮影するとずれしまっていて、その誤差を赤道儀側にすでにフィードバックしているので、今一度フレーミングを見てみると、

のように、黄色い丸がずれているのがわかると思います。横にずれたのはカメラが90度回転しているからです。この状態で再度「導入」を押すと黄色い丸がM57のところに行き、実際に撮影してみると

のように、今度は本当に赤道儀がM57の方向をきちんと向いていることがわかります。
その他
ASI290MMでLRGB撮影をやってみようと思っていて、かなり前に勝手ずっと使っていなかったZWOのフィルターホイールを繋いでみました。ポイントはEFW用のASCMOドライバーをZWOのページから落としてきてインストールしておくことと、NINAを一度再起動することです。これでNINAの「機材」の「フィルターホイール」からZWOのフィルターホイールとして認識され、選択することができるようになります。
フォーカスに関して
- オートフォーカス機能はあるようですが、マニュアルでのフォーカスをサポートするような機能は見当たらない。と思っていたら、撮像の右上のツールのところにありました。今度使ってみます。
まとめ
だいたい試したのはこれくらいでしょうか。2度に渡って使用して、その使い勝手をレポートしましたが、2回目は撮影まではしていないので、まだ説明が不十分なところもあるかもしれません。例えば、フォーカサーとかフラットパネルと接続した撮影の機能もあるみたいで、ここら辺は機材を持っていないので試すことができません。
とりあえず十分すぎるくらいの機能があることもわかって、撮影するには何も不便なところはなく、ベータ版でもすごく安定しています。
前回と今回の記事を読めば導入して撮影するまでできるのではないかと思います。わかりにくいところがあったらコメントしてください。私も全部理解しているわけではないですが、質問に答えがてら理解していきたいと思います。


コメント
コメント一覧 (11)
このソフトは、APTより良さげな感じですね。
一度、ダウンロードして、比べてみたいと思います。
kiharasさん、こんばんは。
わたしもAPT使い始めたばかりなのですが、NINAに早速浮気しています。
かなりいいですよ。
自分はNINAに出会うまでプレートソルブ未経験でしたので、プレートソルバーは曇天夜で人気だったASTAPを選びました。本体とそのデータをインストールしてNINAでパスを通しただけで上手く行き、ASTAPもとても簡単でした。衝撃だったのは、座標の位置設定を掛ける前の、全然違う明後日の方向を撮った画像からでもプレートソルビングに成功したことでした。もしかして当たり前のこと? あと、フレーミングアシスタントで以前に自分で撮影した画像ファイルを読み込み、プレートソルビング出来るのも面白そうに思いました。これまでは、構図合わせに余計手間を掛けることが面倒そうだし現場での時間も勿体ないしと挑戦しようとも思わなかったのですが、これなら日が開いてからの”撮り増し”もやってみたいカモと思えました。
あとNINAで面白そうだなと最近思っているのは、ちょっと前に、フォーカサーの項にバックラッシュの問題解決を容易にする”オーバーシュート法”という方式が組み込まれ、ZWO EAFのような高価でない後付けフォーカサーでも、Vカーブを描かせオートフォーカスできそうな点ですね。
ひとつ上の記事で触れらているEOSのカメラ温度が拾えない点は、NINAの弱点なんですね。自分は、BYEOSもAPTも実戦未経験で気温ロガーや外付けの温度センサーを人力で利用する流れなので意識していなかった・・・これは出来たほうが絶対楽チンですよね。
TKさん、こんばんは。
マニュアルだけを読んでも良いのですが、使ってみて気づいた点を重要視するようにしています。他の人も実際使ってみたときに「あーっ」と思ってもらえれば嬉しいです。
ASTAPも評判良いみたいですね。私はATPで設定したのをそのまま使ったのでASTAPは試さなかったのですが、ATPでは2通りのプレートソルブがあって、局所的なPlateSolve 2と場所を指定しないAll Sky Plate Solver(ASPS)があります。後者の方は初期位置の情報がなくても場所を特定するので、多分最近のプレートソルブはすごいんだと思います。でも、APTよりもNINAの方が解析時間が全然短い気がしました。これはプレートソルブに送る画像をうまく処理とかしているからなのでしょうか。いずれにせよ、昔BYEと合わせてやっていた時より、全然実用になるくらい簡単です。
フォーカスはまだ全然試していない機能の一つです。EAFそろそろ欲しいのですが、なかなか出張ついでに店舗に行けないので諦めて通販にしようかなと思いかけているところです。
EOSカメラの温度はAPTでも拾えると聞いている(まだ試していない)ので、BYEだけの特権ではないはずで何か手があるはずです。NINAのバージョンを待とうと思います。
ところで外付けセンサーって、何かそんなカメラセンサーの温度が別でわかる機材があるのでしょうか?調べたけど分かりませんでした。
やっぱり最近のプレートソルブが凄いのは当たり前のことだったんですね。完全自動化やモザイクする訳じゃないから自分には用はない!とこれまで思っていたのですが、もともとPCを持ち出すスタイルなら、手間もコストも掛からずこんだけ簡単だと普通に超便利じゃん!と今更感動、目から鱗(笑
自分の温度センサーの件は、カメラセンサーの温度でなくカメラ付近の温度を記録してるだけです。今は、Elitech RC-5 USB温度データーロガーとプローブ付きの温度計を併用です。後からログの時刻見て突き合わせ確認して、、、というローテクぶり。
https://theskysearchers.com/viewtopic.php?t=1656
後半にカメラ温度に関した議論がされていて、その中で
・この温度値が何なのかを公式には謳っていない。(現時点明確な文書は無くSDKに含まれてない)
・この温度は画像センサー温度ではなくDIGICチップ内での温度の可能性があり、その動作由来を反映してしまっている可能性がある。
・この温度センサーは、露出時間に伴う画像センサーの発熱変化を拾えていないように見える。
・ゆえにDSLRでダークライブラリを使用することは、そもそも最適ではない可能性が高い。
・信頼性の低い情報を使用し近似を試みるより、その場でダークを生成することで最高の精度が達成される。
といったことを指摘されている方が居ます。このデールゲントさんという方は時々NINAのプロジェクトにコミットされている方のようです。
それでもDSLR+NINAで効率化優先の発想でファイル名に温度を自動記録させるなら、今の所、ASCOM対応の気温センサーかそれ付きのフォーカサーを利用するしか手がない?あるいは、自分も確かめましたが温度の値は元々EOSが吐くExifに記録されてるので、スタックソフトが読み出しに対応してくれたら解決なのかも、とも思ったり。
DSLRにもシャッター降ろしたまま露出できるコマンドがあれば、シーケンスに現場ダーク取得も組み込んで、質も追求しつつお任せで楽チンなのかも知れませんね。
なるほど、カメラ付近の温度ですか!勘違いして申し訳ありません。
ところで、この記録された温度はセンサーの温度とは違うという話ちょっと興味あります。ダーク フレームを撮影するときに、温度制御はできないので、冷蔵庫に入れて温度を結構な範囲で変化させてBackYardEOSでダーク を撮影しています。その時の温度と実際のノイズの大きさがズレる時があるのです。動画にまでまとめたのですが、あまり面白くないと思ってお蔵入りにしようと思ってました。少し記事にまとめてみます。
記事を拝見して、ご相談させていただきたく、コメントを差し上げました。
eos6DをN.I.N.Aで制御して、ASPSまたはASTAPでプレートソルビングができるようにシステム構築をしています。
eos6DはASCOMDSLRで接続しています。
しかしながら、N.I.N.Aを介したプレートソルビングがうまくいっておりません。
撮像はできるのですが、プレートソルビングでエラーになってしまいます。
RAWファイルをFITSファイルに変換した後で、ASPSで直接解析すると、位置特定には成功しますが赤道儀の位置修正に反映されません。
このような状態です。
何か設定でつまずいていると思われますが、自分で原因を見つけられず悩んでおります。
大変恐れ入りますが、アドバイスいただけますと幸いです。
どうぞよろしくお願いいたします。
sekidoさん、はじめまして。私は一眼レフカメラをNINAで走らせて撮影したことはないのでどこまで答えられるかわかりませんが、いくつか確認してほしいことがあります。
まず基本ですが、「機材の接続」の「望遠鏡」のところで赤道儀はNINAに接続されていますでしょうか?これが接続されていないと、そもそも何も動きません。赤道儀は接続されているとして、プレートソルブをした時のエラーはどのようなものでしょうか?
プレートソルブの設定にもよると思いますが、たとえ一眼レフカメラでも動作原理を考えたら不可能ではないと思います。それでもCMOSカメラの方が簡単だと思うので、もしCMOSカメラを使える環境なら、そちらから試した方がいいと思います。
NINAでは試したことはないのですが、SharpCapなら一眼レフカメラで試したことはあります。
http://hoshizolove.blog.jp/archives/49950320.html
ただし、こちらもCMOSカメラより苦労した覚えがあります。
あと、プレートソルブはNINAやSharpCapで動くASTAPよりも、SharpCap標準のSharpSolveの方がはるかに安定しています。まずはSharpCapから始めるのも手かもしれません。
http://hoshizolove.blog.jp/archives/50681983.html
うまいくいかない場合は、Zoomなどで繋いで一緒に解決してみることもできます。X(旧Twitter)のアカウントはお持ちでしょうか?Xで「ほしぞloveログ」と検索するとすぐに私のアカウントが出てくると思うので、DMを下さればメールアドレスなど交換してそれ以降直接やりとりできると思います。
ご返信いただき、ありがとうございます。
・赤道儀は接続成功と表示はされましたが、NINAからの目標導入操作が出来ませんでした。ちゃんと接続できていない可能性がありますので、改めて確認いたします。
・プレートソルブをした時のエラーは、
Value can’t be null (Parameter ‘dub’) でしたが、この表示がされたのは一度だけで、それ以外はエラー表示なしで、結果の表にバツ印がつきます。
あいにくCMOSカメラを持っていないので、アドバイスいただいたSharpCapの方でも試してみます。
XのDMについて、ありがとうございます。是非、後ほど送らせていただきます。
いつもsamさんのブログやYouTubeを拝見して勉強させていただいております。この度、ご返信いただき大変感激しております。
今後とも、どうぞよろしくお願いいたします。
NINAの「スカイアトラス」で目標天体を検索して「導入」で目標天体の方向に(たとえ視野内に入らないとしても)向かっていかないなら、何かおかしいと思います。ちなみに赤道儀はどんなものでしょうか?
DM見たので、こちらか連絡いたします。